Elenco Titan Tank
For a robot-themed Boy Scout district event, we decided to provide inexpensive robot kits to each troop. Being the tech guy, I bought a dual kit to see how well then worked. These are readily available on the net.

The manual is on-line, but here’s a copy just in case you want it:
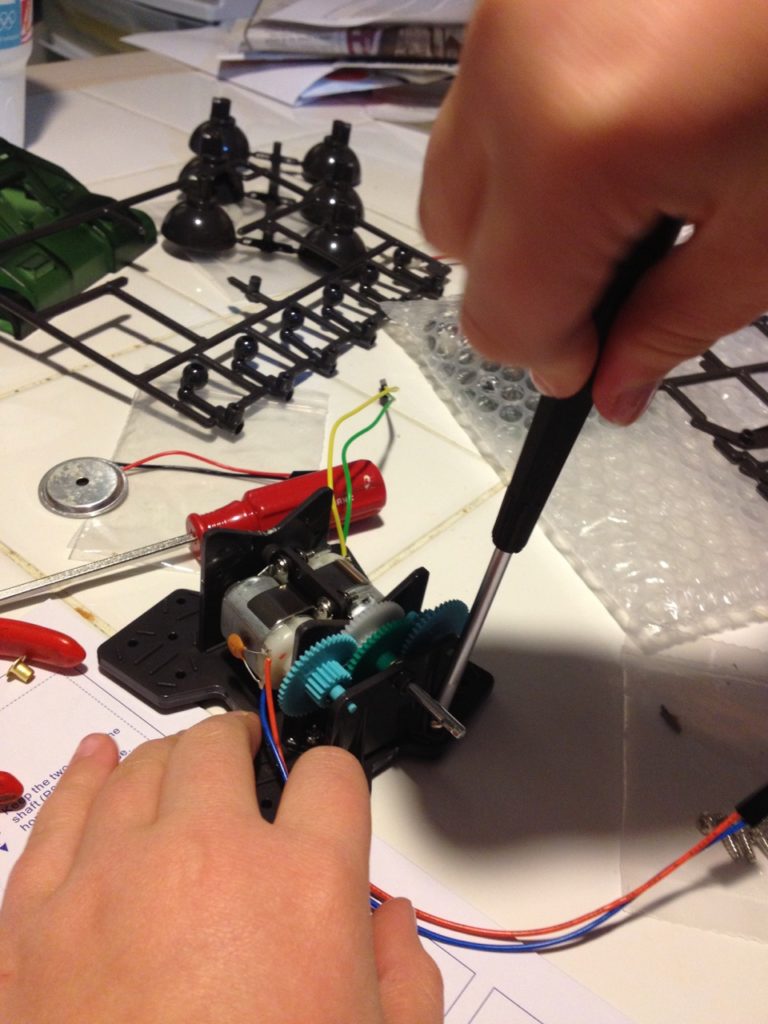
A software engineer with a strong EE background should have no problem building one, but could the average Boy Scout get one assembled properly? My son wasn’t too interested at the time but my daughter Megan was anxious to try it:

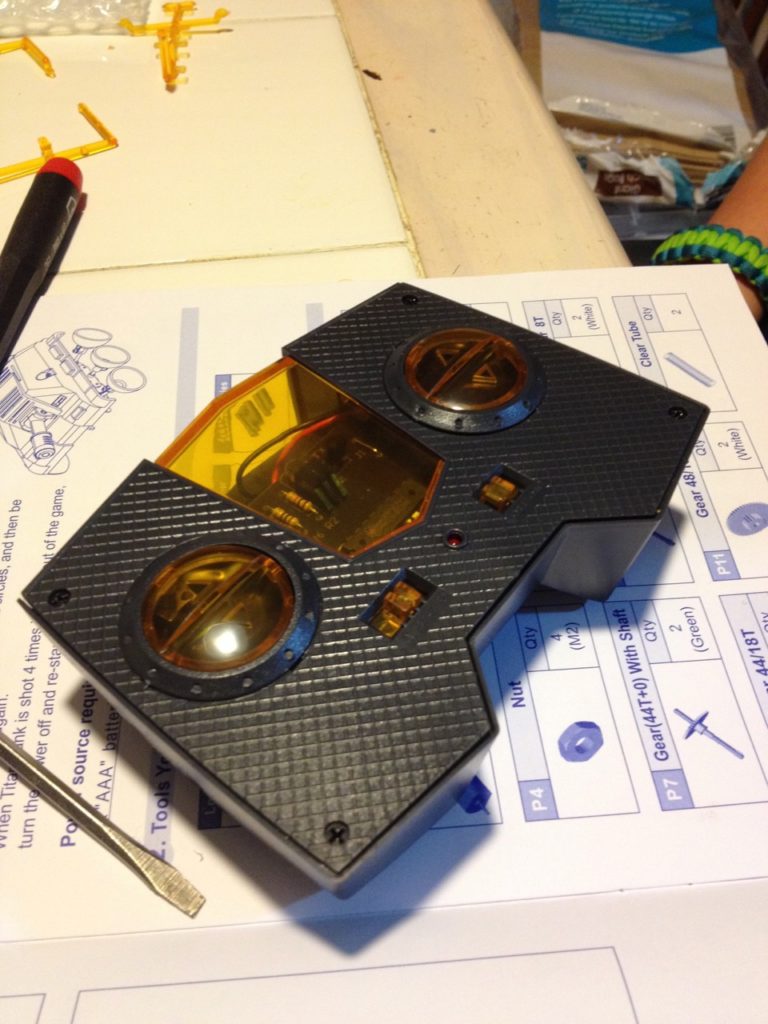
The remote was pretty basic, although the plastic case was a bit cheesy:

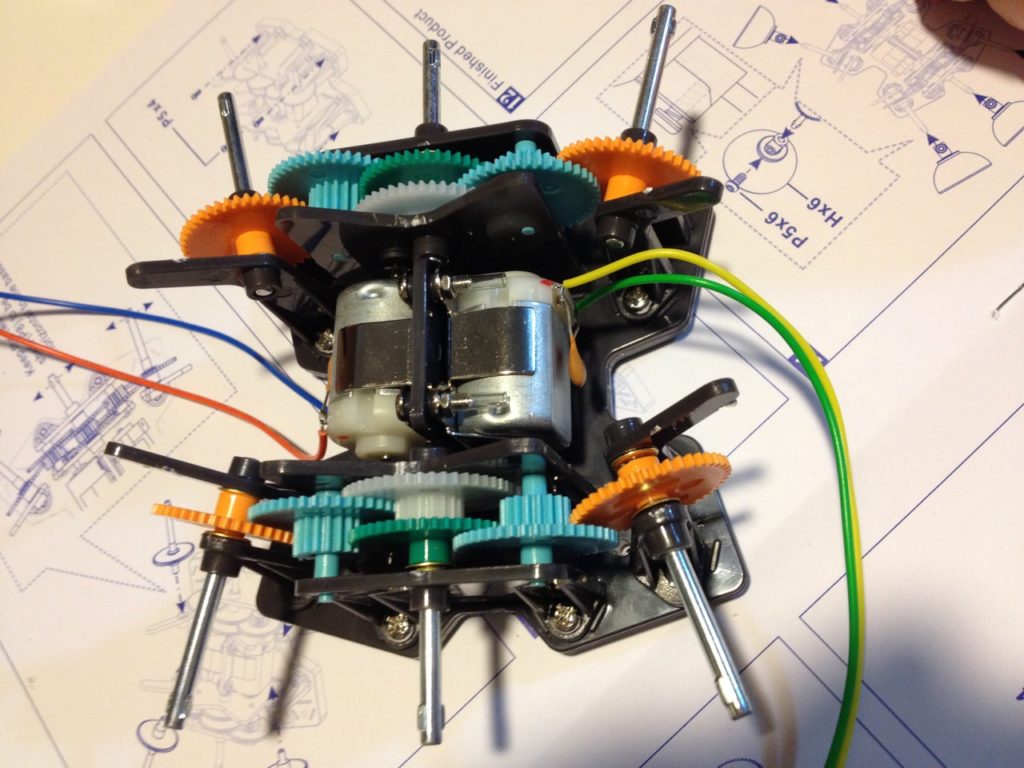
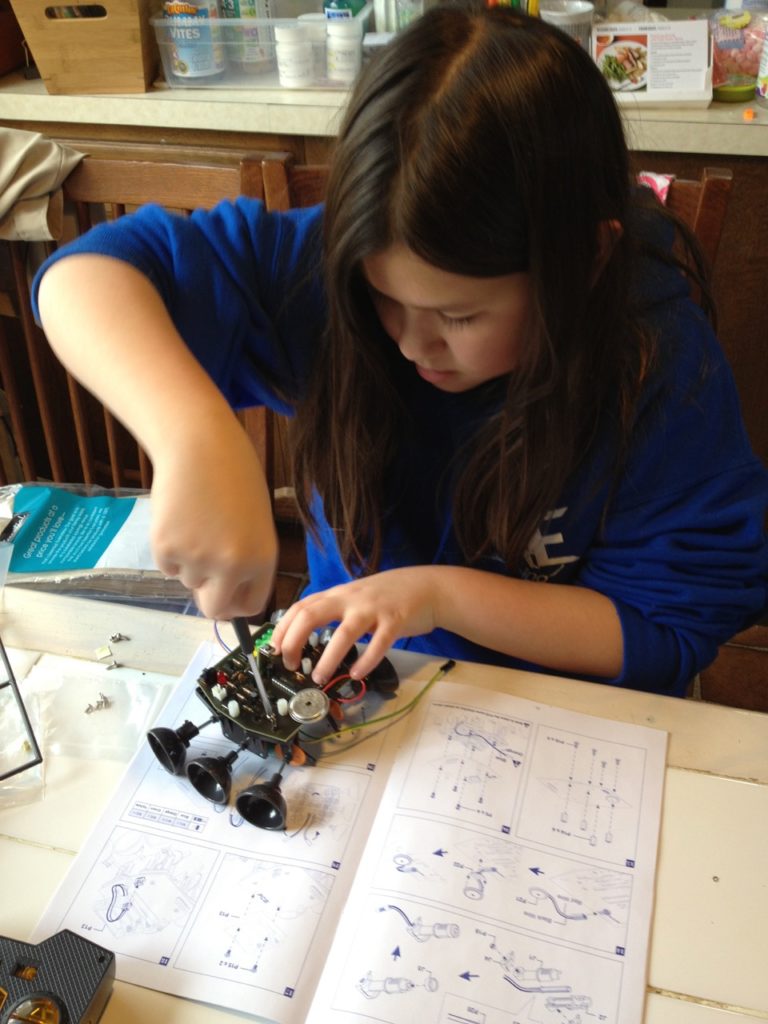
There are a lot of parts in the main ‘bot but Megan had no problem with it:

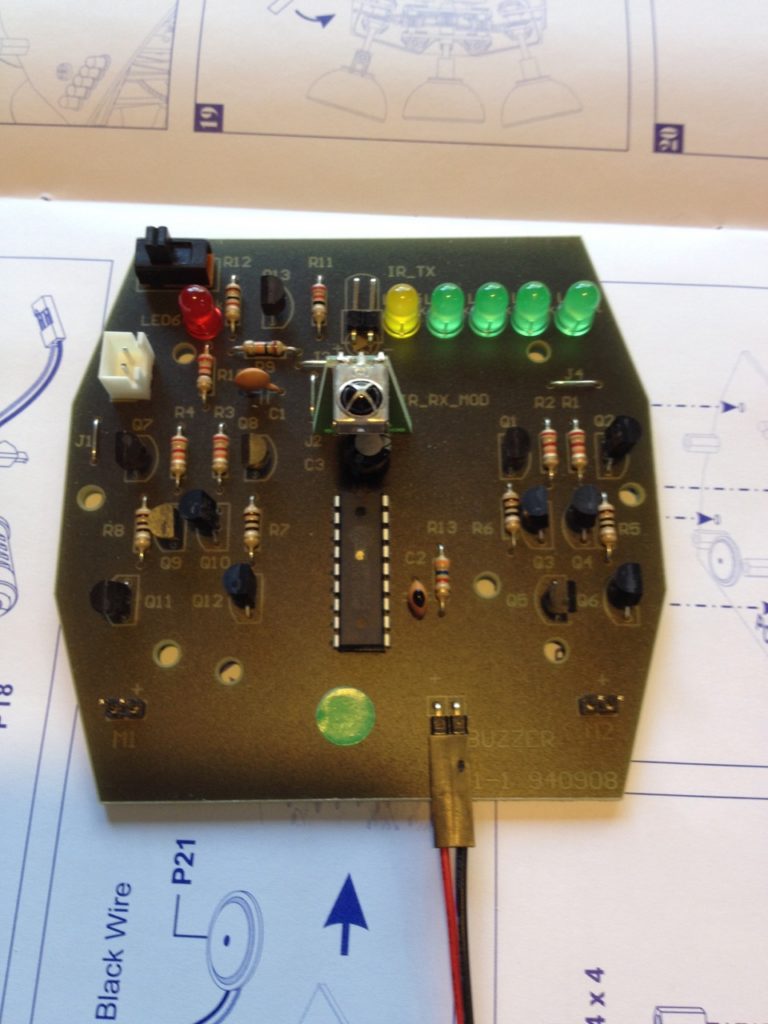
The ‘bot circuit board. We’d later do some hacks to make this work better, but we didn’t know this at the time:

Keira the Kat was not impressed nor frightened.

It looks a whole lot fiercer with the stickers, eh?
